"21st Century Robotics (Scientific American Cutting-Edge Science)" (2007)
Summary
These are a few exerpts from the 2001 book series, Scientific American Cutting-Edge Science. This volume is 21st Century Robotics. Apart from defunct companies, not much has changed in the last 15 years.
Thomas J. Burick a startup company called, "White Box Robotics" which aims to make plug-and-play robots. In the article, he showcased 912, which was a white robot that uses consumer-available parts, runs a Windows OS, and can be programmed out-of-the-box to recognize things and say things to them. Image recognition was good -- it could recognize things from 4 feet away and at an odd angle. I guess it can do anything a Raspberry Pi or Arduino can be programmed to do.
Telerobots
Long-Distance Robots, Mark Alpert
A telepresence robot is equipped with a video camera, microphone, and a wireless internet connection. It also has wheels to move around, and flippers to get it up stairs. It looks like a giant column with a monitor attached to it. In 2001, iRobot had the Cobalt 2, but in 2015, the equivalent is Ava 500.
Roomba (2000 by iRobot. $200 in 2001, still available in 2015!)
Trilobite (2001 by Electrolux. $1,500
size of a toaster oven, two wheels, wheel odometers to measure movement, bump switch when it hits something
size of car hubcap, 6 lbs, only has an "on" button and a setting to clean small, medium, or large rooms
resembles a Roomba, but more powerful
You can control the Cye with wireless link to your desktop software. The software estimates its position using dead reckoning, and keeps track of uncertainty in position. Sometimes it will intentionally try to bump into walls to find out where it is. However, the software tends to crash and the robot does not deal well with obstacles.
After pressing "on," the Roomba moves in a spiral, then straight, then in a seemingly random walk. After about 30 minutes, the Roomba declares victory and stops. Roomba is good at avoiding edges, so it will not fall down stairs or tables. However, the wheel does get jammed in rug corners at a high frequency. It is affordable, though.
The Electrolux is much more rug-friendly than the Roomba. It uses sonar to detect obstacles so it does not bump into walls, and it has a position tracker so it can go back to home base and charge itself. It does however need magnetic strips placed around the house to mark the edges.
James Spader likes an overiew of social robots!
Reference Shelf: Robotics (2010)
Summary
A collection of articles on robotics from 2010. It focuses on applications of robotics (workplace robots, space robots, CPOE and clinical decision support, military drones), but also includes articles discussing ethical issues like robot rights.
Things that robots like
Machine learning - crude model + lots of data = classification
Social robots - robots + psychology. Imagine robots that have social fluency, conversational skill, and a convincinly human-like presence
Bootstrapping - start with a few basic tasks and gradually construct a more sophisticated competence
Companion robots
In 1999, Sony marketed Aibo the robot dog for $2,500 and it was a commercial success. Aibo was designed to have no use, providing only entertainment and amusement. The creator of Aibo, Toshitada Doi, said that useless things are often of great value because they enrich us. If autonomous robots can be created, then it does not matter if they are useful or not. The Aibo can respond to orders, chase a pink ball, and can be trained from a puppy level to a dog level.
James Spader likes robot applications!
Robots: From Science Fiction to Technological Revolution (2005)
Summary
These are a few exerpts of some of the more interesting domestic or social robots. Most of the projects are defunct.
Home health robots
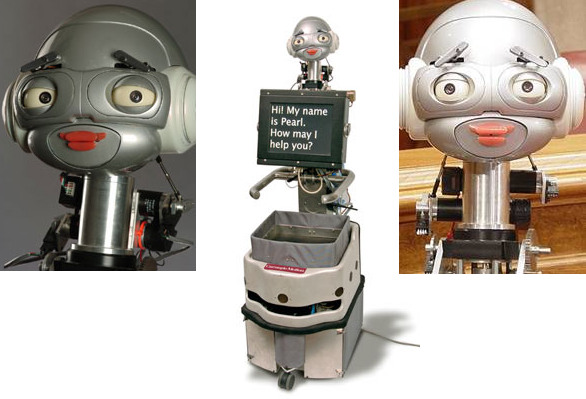
Pearl is a robot nurse assistant developed by Carnegie Mellon. Pearl keeps the elderly company, reminds them to take their medication, calls for help. She costs $100,000 to make and there is no consumer version. However, I respect ambition. Here is what they wanted to do with the nursebot:
Intelligent reminding - remind patients about taking pills, eating meals, inclement weather, or medical appointments
Social functions - elderly, shut-in people who live alone with no social contact may feel less isolated with a robot companion
Surveillance - systematic data collection allows for analysis and detection of medical emergencies
Telepresence - really hard to do in 2005!
Object manipulation - for old people with arthritis. I told you it was ambitious!
Androids
In 1986, Honda felt the car market was no longer growing and invested heavily in robotics. In 1997, Honda released P3, a landmark in android robots. It was a flawless walker and could go up and down stairs, kneel down, and if pushed over, could get right back up. It set the standard for bipedal walking.
In 2001, Honda released a P3 upgrade called Asimo. It was not named after Isaac Asimov, but a neoglogism from the Japanese word asi which means feet, and the English word move. It is also a acronym for the Adanced Step in Innovation Mobility. This robot is still active in 2015, but it is mainly in showrooms. It costs $175,000 for a yearly lease in 2004.
In 2003, Sony released Qrio, the android robot that could recognize faces and voices, avoid obstacles, go up stairs, run at 1.5 miles an hour, and get up if pushed to the ground.
James Spader likes a robot keeping a diabetes diary!
The Aliz-e project aims to develop a social robot to help chronically ill children manage their disease. Social robots are increasingly designed to be our pets, assistants, teachers, and even emotional companions.
The Nao robot is supposed to show a variety of emotions
Summary
In this study, the diabetic children keep a diary at home for two weeks, and intermittently interact with the robot via video-conference. The robot had 3 major characteristics:
Self-disclosure - sharing information with others that they would not normally know or discover. Self-disclosure encourages reciprocity, so if the robot discloses things about itself, it will encourage the child to self-disclose as well.
Empathy - joint understanding of another persons inner world and emotions. Robots cannot feel empathy, but they can emulate it.
Embodiment - having a physical body. Robots with virtual avatars exist, but children like the physical form more
Dialogue model
Diary-related dialogue - the dialogue related to the diary was structured and invariant for each child.
Interpersonal dialogue or "small talk"
Self-disclosure small talk - the robot would share information about itself and ask the child to do the same. For example. the robot would say what its favorite pets were, and asked the child what its favorite pets were.
Diabetes self talk - the robot would ask the child what it learned in school about diabetes, basic questions about diabetes, and any fears related to diabetes.
Wizard of Oz
Some of the robot's functionality is simulated, but the participants who interacted with the robot thought it was autonomous. The robot could convert text-to-speech. The experiment leader listened to the children's remarks, and chose the appropriate dialouge remarks from the model, and added in the cheering and nodding movements. If the child did something unexpected, the leader had to intervene and manually type a reponse.
Results
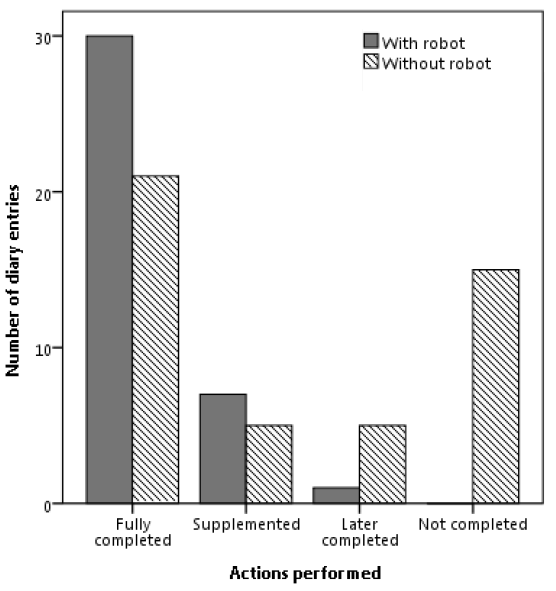
The robot seemed to motivate the children to write more in their diabetes diary, and more often. They were also very engaged with the robot, and refused to be distracted by their parents or siblings. Although the children said they believed the robot had empathy and feeligns for them, there was so much puppeting of the robot by a human, that it is more likely that it was the effect of a human.
Having a robot made the children more likely to fill in their diary
James Spader likes diabetes-themed Trivia Pursuit with a robot as a host!
Some kid with the Nao robot
Children with diabetes have many things to monitor: carbohydrate intake, physical activity, blood glucose, signs of hyper and hypoglycemia, and injecting insulin
Wizard of Oz (WoOz)
A Wizard of Oz interface means that the robot behaves autonomously, but the researcher partly simulates the model and sensors. The reseacher can pick which phase of the interaction to start with, and tell the robot what the child has said. This is because the dialogue model and speech recognition modules are still in development.
The robot would ask the child to participate in 3 quizzes, each of 24 questions. The questions were 50% diabetes-related (What is healthy sugar level? How do you recognize a hypot) and 50% based on the interests of the child (If one arm of an octopus has 50 million cells, how many cells are in all the octopuses arms?).
Results
Comments from children
The children liked playing with the robot because "he knows a lot," "he is funny," and they wanted to know how they would perform on the next quiz. They did not like the repetition of the questions and sometimes he was slow to answer. They liked that the robot's eyes could change color to the child's favorite color and that "he could talk and move."
Body language all robots
All children looked pensively at the monitor and frowned when thinking about the answer to a question. At first, they would sit very close to the robot. Later in the session the child would look around the room and recline more. They were enthusiastic when they won the quiz ("Yippee!" or smiling).
Body language with personal robot
With the personalized robots, the children would look at the robot longer, interact with it more, and more elaborate in their utterances. They would even call the robot by his name, Charlie.
Interesting thoughts
People try to make robots imitate humans, but what about the converse? From the second quiz onwards, the children began to imitate the robot speech patterns and vocabulary.
Unfortunately, Charlie, that is not the correct answer. The correct answer is A.
On what side of the road do you drive in England, question mark. (The text-to-speech synthesizer says the words, "question mark" when it meets the ? character)
"Robotic materials" make fully programmable the relationship between signals in embedded senors and the material properties activiated by embedded actuators.
Applications
There will be an initial trade-off of increased cost, weight, and inferior structural properties of the added functionality of the embdedded sensing, actuation, and computation. This will lend the first applications to be high-value materials, such as camouflage, airfoils, and prosthetics. In the future, there should be smart everyday materials like dinner tables that selectively heat or keep things cold, insoles that measure pressure and change their cushioning, or interactive print magazines, like those Hogwarts magazines.
Background
Micro-electricamechnical systems (MEMS) allowed for the microscale manufacturing with the same processes as their analog and digital semi-conductor counterparts. Accelerometers commonly found in cell phones are a mainstream MEMS device. Smart dust could form programmable matter.
There are two active fields: sensor networks and amorphous computing. Amorphous computing has laid the foundation for large-scale distributed systems in which individual computing elements do not need to be in a precise geometrical arrangement. Sensor networks is beginning to explore the foundations and networking and routing in such systems. Pushpin computing engineers layers of information into everyday objects, such as push pin and floor tiles, so they can change their physical propertoes.
The biggest limitation of multi-functional materials are their structural properties. In particular, their structural properties such as strength and stiffness, and non-structural properties such as sensing, actuation, self-healing, and energy harvesting. Morphological computing says you can have feedback loops and rectification by tuning the material properties of a stucture. Cool.
Parts of the robotic materials
Sensing - classic stimulus-response materials "sense" their environment and change their properties in response to external stimuli, which can be acoustical, electromagnetic, optical, thermal, or electromagnetic.
A dress that can sense sounds and contort depending on where the sound is coming from and what frequency it is.
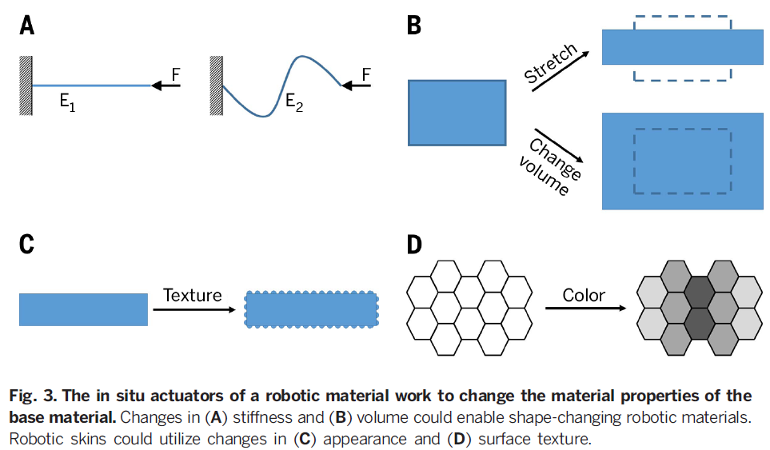
Actuation is the changing of the material properties of the underlying base material.
Common ways of actuation
Local computation solves the problem of having lots of sensor and actuators fighting to send out signals outward. Routing vibration signals sampled at 1 kHz becomes increasingly difficult as the number of sensors increases. What if we used most of the information for local feedback controll, and then only seldomly send out signals to be transferred outside the material?
Algorithms that run on robotic materials should:
They must scale as the material grows in size
They must run with the limited computation and memory resources of each node
They must be robust with the failure of individual nodes